Better Localised Autonomous Scouring and Tethered Ejecting Rotorcraft is a project initiated by Aerial Innovation Research (AIR) Laboratory @ SUTD, a research lab based at SUTD that specializes in novel drone designs and technologies. The BLASTER drone ejects a high pressure water jet stream to clean debris of tall structures such as walkways. During my polytechnic studies, I first joined the project as an intern, and was then employed as a full-time research technician before leaving for National Service. After matriculating into SUTD, I was invited back to contribute during the summer break. My main responsibilities included designing drone components using CAD and 3D printing, as well as developing and fabricating test rigs for research experiments using Arduino, sensors, and 3D-printed parts.
Research technician
CAD, Design Engineering, Experiment and Testing using Arduino, electronics
Worked alongside phD students and full time research assistants
SolidWorks, Arduino IDE, Python, Processing
11 months (cumulative)






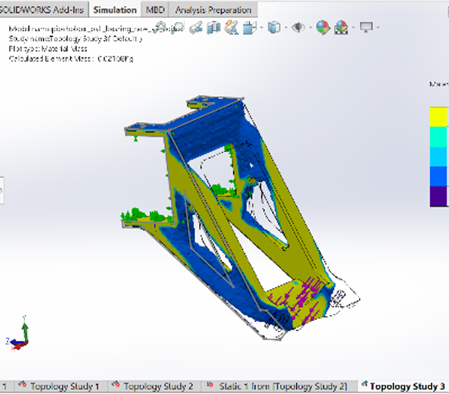
Solidworks was new to me as I first joined Airlab, but over the months working with it, I would say I have managed to attain a good skill level and proficiency in modelling, working with big assemblies, rendering, creating engineering drawings, using FEA method analysis. I have designed over 20 parts for the drone and drone testing applications.

During my time at AirLab, I was responsible for developing experimental test rigs using sensors for research applications. I worked with load sensors paired with HX711 amplifier boards, utilizing Arduino IDE, Python, and Processing for data acquisition and analysis. The project also involved hardware integration through soldering and 3D printing.